LinearImageSensor
TCD1304AP + 아두이노 자료
바람C
2022. 4. 1. 20:43

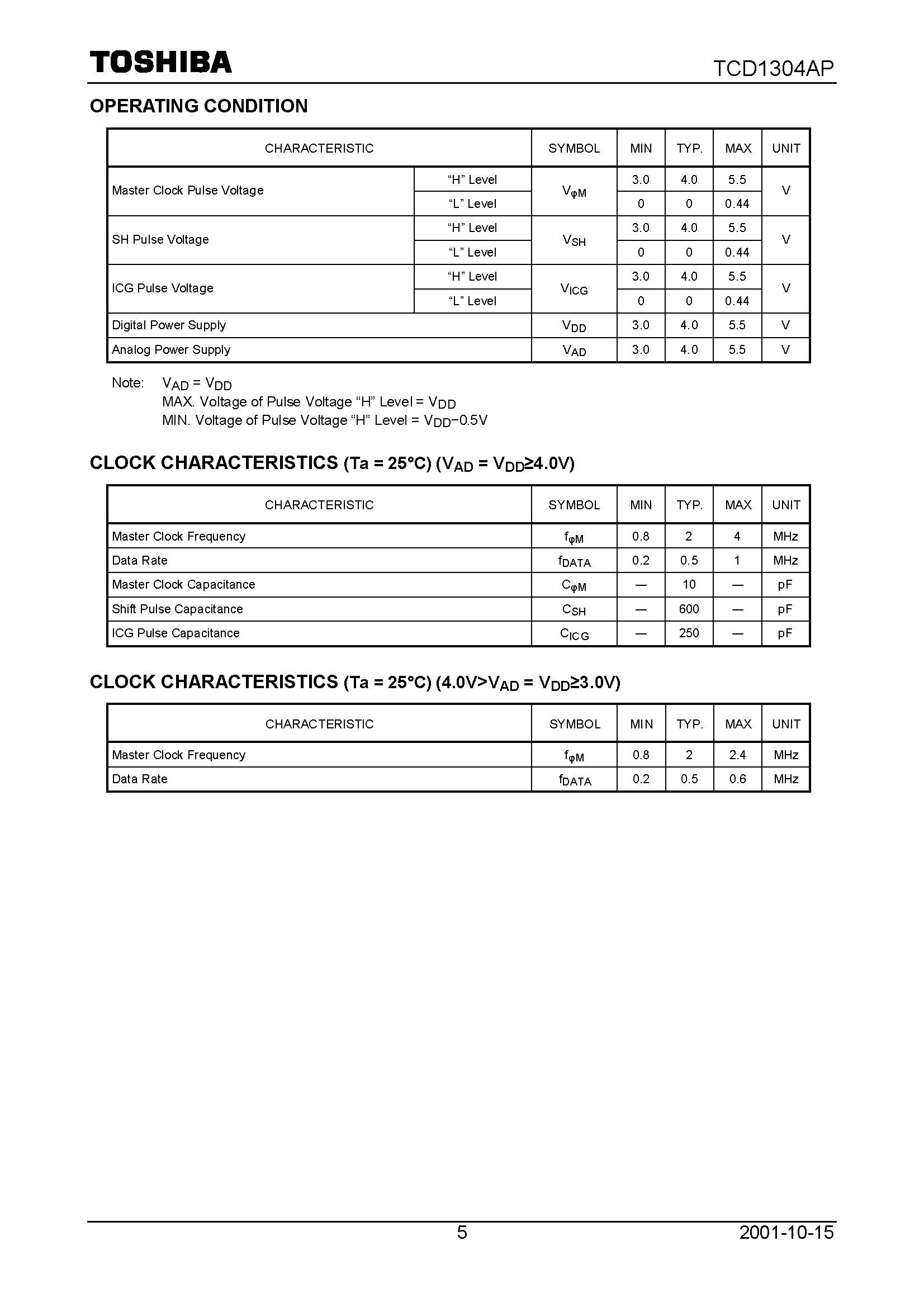
TCD1304AP 자료
PDF :
--
Using An Arduino R3 to power the TCD1304AP CCD chip... | Details | Hackaday.io
<p>I am never too proud to admit when I have "hit" the proverbial brick wall of discovery, I have, with the concept of using the JDEPC-05 cmos camera as the detector for this project. The cmos chip will not work with this configuration, I understand now wh
hackaday.io


#include <util/delay_basic.h>
#ifdef ARDUINO_AVR_MEGA2560
#define LAMP 0x20
#define SH 0x40
#define ICG 0x80
#define MCLK 0x10
#else
#define LAMP 0x01
#define SH 0x02
#define ICG 0x04
#define MCLK 0x08
#endif
#define CLOCK PORTB
uint8_t buffer[800];
uint8_t avg = 0;
char cmdBuffer[16];
int cmdIndex;
int exposureTime = 20;
void setup()
{
uint8_t val;
// Initialize the clocks.
DDRB |= (LAMP | SH | ICG | MCLK); // Set the clock lines to outputs
CLOCK |= ICG; // Set the integration clear gate high.
// Enable the serial port.
Serial.begin(115200);
// Setup timer2 to generate a 470kHz frequency on D11
TCCR2A = + (0 << COM2A1) | (1 << COM2A0) | (1 << WGM21) | (0 << WGM20);
TCCR2B = (0 << WGM22) | (1 << CS20);
OCR2A = 20;
TCNT2 = 1;
// Set the ADC clock to sysclk/32
ADCSRA &= ~((1 << ADPS2) | (1 << ADPS1) | (1 << ADPS0));
ADCSRA |= (1 << ADPS2) | (1 << ADPS0);
}
void readCCD(void)
{
int x;
uint8_t result;
CLOCK &= ~ICG;
_delay_loop_1(12);
CLOCK |= SH;
delayMicroseconds(5);
CLOCK &= ~SH;
delayMicroseconds(15);
CLOCK |= ICG;
delayMicroseconds(1);
for (x = 0; x < 800; x++)
{
CLOCK |= SH;
if (x == 0)
{
avg = (uint8_t)(analogRead(A0) >> 2);
result = (uint8_t)(analogRead(A0) >> 2);
}
else
{
result = (uint8_t)(analogRead(A0) >> 2);
if (result < avg)
{
result = 0;
}
else
{
result -= avg;
}
buffer[x] = result;
delayMicroseconds(20);
}
CLOCK &= ~SH;
}
}
uint16_t centroid()
{
uint16_t x;
uint32_t sum = 0;
uint32_t so_far = 0;
uint32_t half_max;
for (x = 0; x < sizeof(buffer); ++x)
{
sum += buffer[x];
}
half_max = sum / 2;
for (x = 0; x < sizeof(buffer); ++x)
{
so_far += buffer[x];
if (so_far >= half_max)
{
return x;
}
}
}
void sendData(void)
{
int x;
for (x = 0; x < 800; ++x)
{
Serial.println(buffer[x]);
}
}
void loop()
{
int x;
if (Serial.available())
{
cmdBuffer[cmdIndex++] = Serial.read();
}
if (cmdBuffer[0] == 'r')
{
sendData();
}
else if (cmdBuffer[0] == 'l')
{
CLOCK &= ~LAMP;
}
else if (cmdBuffer[0] == 'L')
{
CLOCK |= LAMP;
}
else if (cmdBuffer[0] == 'e')
{
if (--exposureTime < 0) exposureTime = 0;
Serial.print("Exposure time ");
Serial.println(exposureTime);
}
else if (cmdBuffer[0] == 'E')
{
if (++exposureTime > 200) exposureTime = 200;
Serial.print("Exposure time ");
Serial.println(exposureTime);
}
else if (cmdBuffer[0] == 'c')
{
Serial.print("Centroid position: ");
Serial.println(centroid());
}
cmdBuffer[0] = '\0';
cmdIndex = 0;
readCCD();
delay(exposureTime);
}